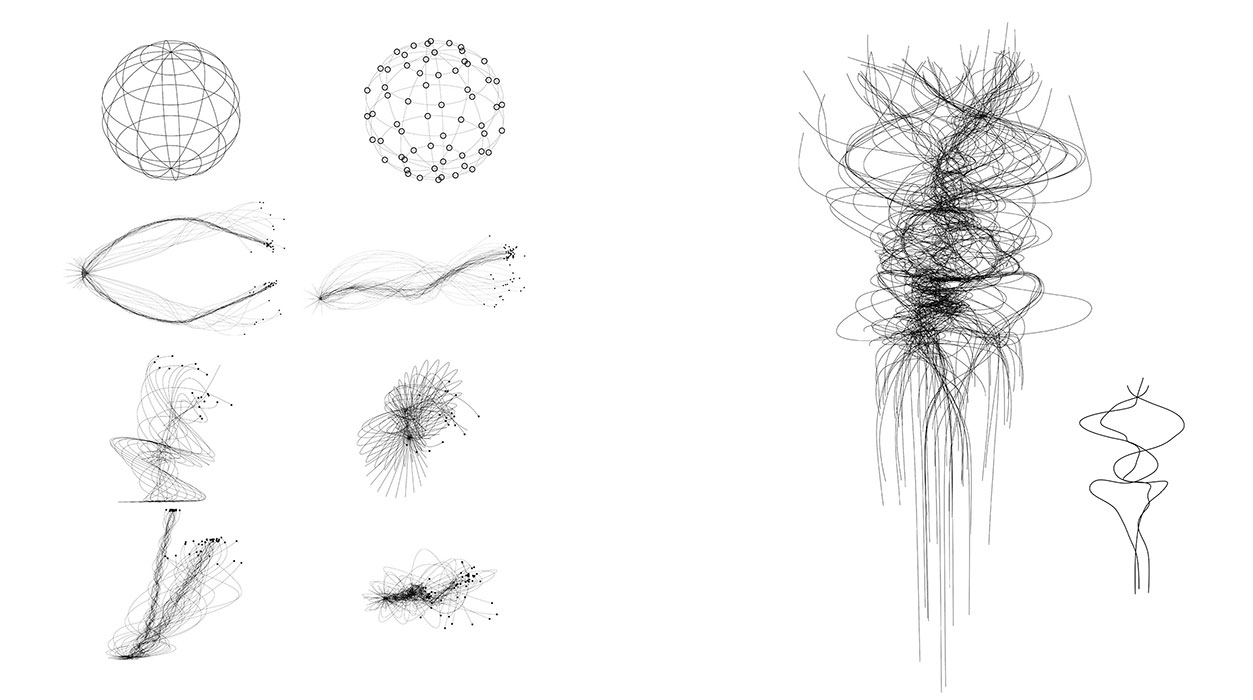
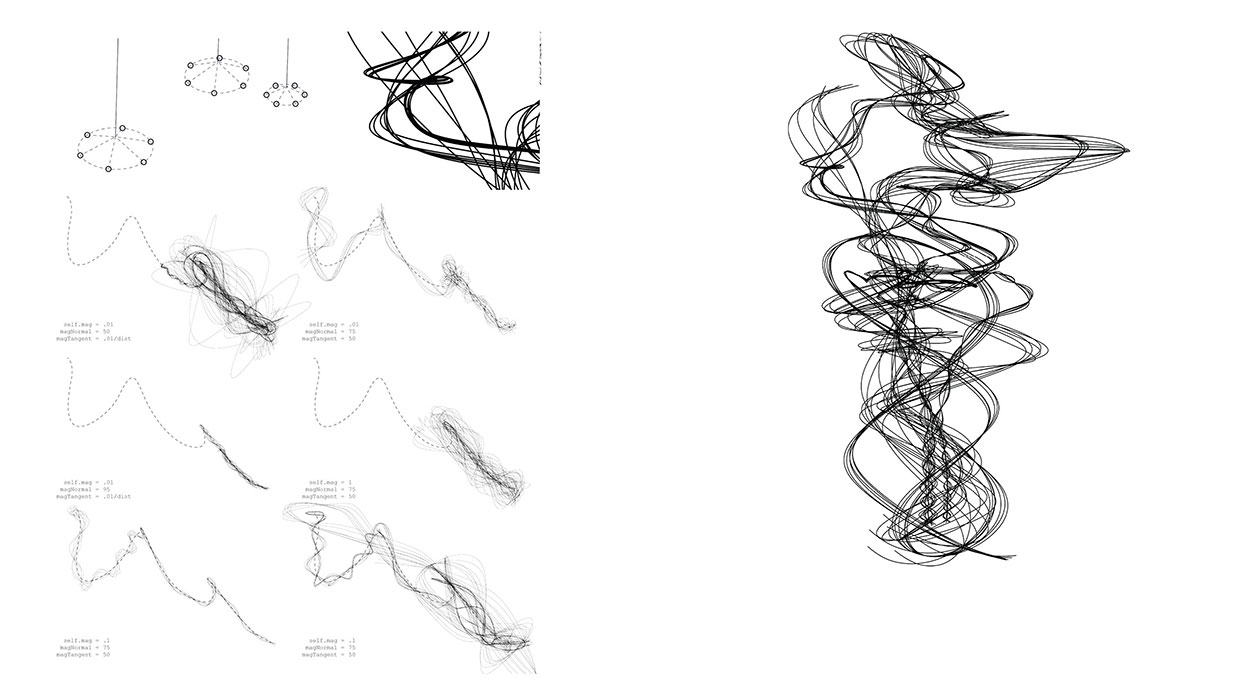
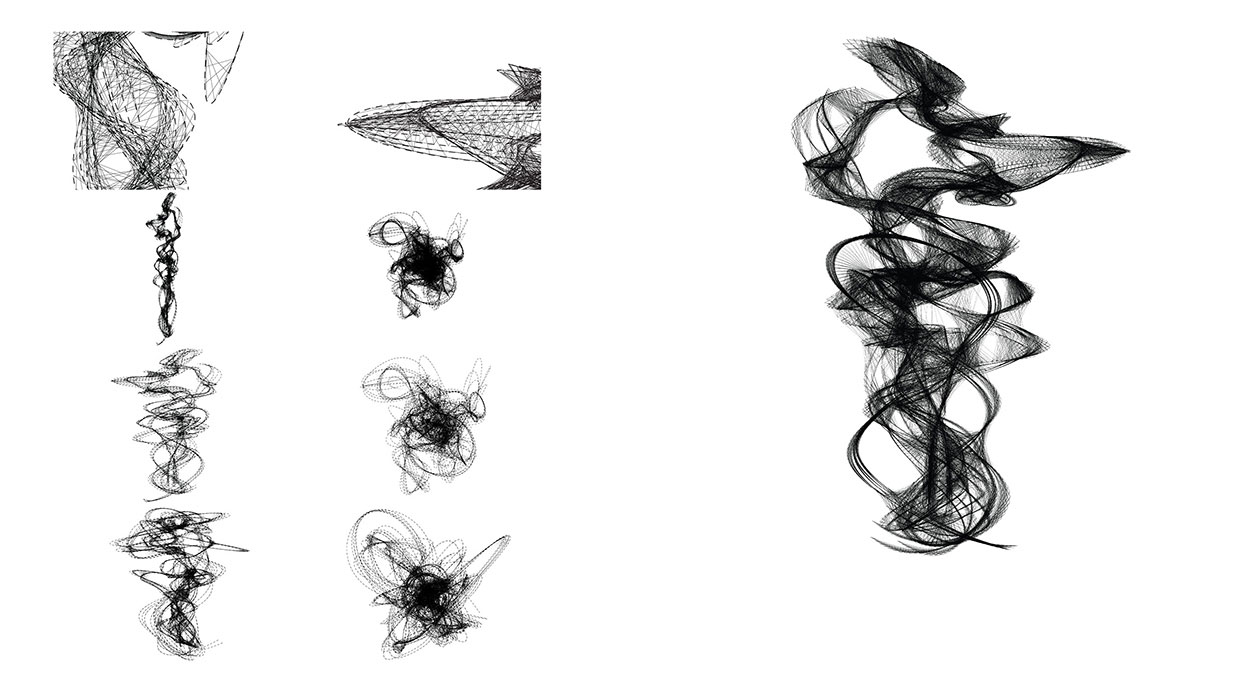
Generation:Form generation occurs in three steps of Python scripting, the latter two generated from the previous step. In the first step, a global rose curve function is applied to a spherical agent array, defining movement by the interaction of self-attracting agent behavior with global equation vectors.Structure:Average curves from the first step are chosen as generators for the second step, which features a circular array of agents derived from the endpoints of the first step curves. The behavior of these secondary agents are a combination of self-attracting particles (i.e. three-body system) and carefully-tuned tangent and normal vectors from the generator curves.Surface:Surface is interpolated from the secondary curves simply by connecting control points with proximal neighbors, given a maximum and minimum search radius; density is defined by rebuild points and number of proximal neighbors.
© 2013 MARK POTHIER