Current Projects:
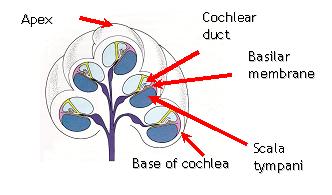
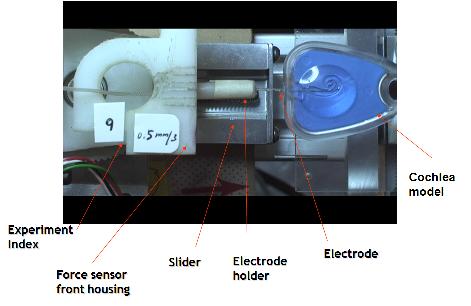
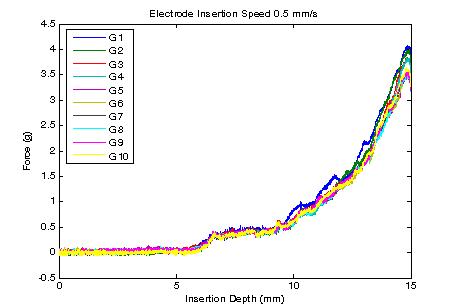
Fig 1: The scala tympani is the largest of several cavities in the cochlea, an organ in the middle ear. The purpose of the experiments was to analyze friction during 1 dimensional insertions of a nonsteerable electrode into a planar plastic model of the scala tympani. A force sensor recorded the force readings generated from the friction of the insertion, as well as the insertion depth of the electrode into the model scala tympani. We performed the insertions at constant speed, for multiple speeds. Figure 2: A picture of the experimental set up Publications: The results of this work were submitted to IEEE International Conference on Robotics and Automation, 2009. Zhang, J., Bhattacharyya, S.,Simaan, N., “Model and Parameter Identification of Friction During Robotic Insertion of Cochlear-Implant Electrode Arrays,” Submitted to IEEE International Conference on Robotics and Automation (ICRA’2009), 2009.
|
|||||||||