"Experience without theory is blind, but theory without experience is mere intellectual play"
Immanuel Kant
Bio sketch
Ireceived the first level Laurea in Control Engineering from the University of Rome "La Sapienza" in 2007 and the Master of Science in Mechanical Engineering from Columbia University in 2009. I am currently working toward my Ph.D.
in Mechanical Engineering at Columbia University. Since September 2008
I have been working with Dr. Nabil Simaan in the filed of medical
robotics.
Research interests
My research interests are in kinematics, dynamics, control, and force sensing of continuum robots.
Conference papers
A. Bajo, N. Simaan, "Finding Lost Wrenches: Using Continuum Robots for Contact Detection and Estimation of Contact Location", in Proc. of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, 3-8 May, 2010 Former research
September 2009 - present: C.O.B.R.A. (Cooperative Bioinspired Robotic Manipulation Architecture)
Since September 2009 I have been involved by Dr Nabil Simaan in this project sponsored by the US Navy and in collaboration with SAIC International, Dr Peter Allen at Computer Science Department of Columbia University, Wayne Book at Georgia Tech.
Phase 1:
Movie (C) shows During
Phase 1 I have focused on demonstraing the micro-manipulation
capabilities of the continuum robots curently being developed in the
A.R.M.A. Lab. I have written xPC code for the tele-manipulation of the
robot using a Phantom OMNI and for closed-loop control using stereo
vision (in collaboration with Dr Allen's lab).Movie (A) shows a three segments continuum robots
moving in random configurations. Movie (B) shows the homing procedure.
During the homing procedure, the current configuration of the snake is
calculated using information given by nine linear potentiometers that I
have installed and calibrated. Movie (C) shows the tip of the continuum
robot moving under a microscope. The side of each square on the
background measure 250 microns. Movie (E) shows the snake chasing
a moving target. The position of both the tip of the robot and the
target are given by a stereo vision system. During the demo, the stereo
vision system and the real-time controller are implemented on two
different machines. The two computers communicate via UDP.
(A)
(B)
(C)
(E)
June - July 2009: dynamics and force sensing of industrial manipulators
During
this period I have focused on dynamics and force sensing of industrial
manipulators. I have designed and coded the real-time control xPC code
for a PUMA 560 and a three dof XYZ stage. Both frameworks include
inverse dynamics and gravity compensation. In particular, I have
derived the dynamic model of the XYZ stage in closed form and
identified the mass properties from the user manual and
PRO/Engineering. Moreover, I have implemented the hybrid motion/force
control on the XYZ using an ATI force sensor. The motion/force
controller is currently being used in the A.R.M.A. Lab for estimaton of
stiffness and shape of soft tissues. The following movies show the
implementation of the gravity compensator for the PUMA 560 and the XYZ
moving under hybrid motion/force control (Courtesy of Roger Goldman).
January - May 2009: Columbia University, New York, USA
During the Spring semester of my MS I focused on hybrid motion/force control and redundancy resolution of robot manipulators. In
particular I implemented and simulated the hybrid position/force
control proposed by Raibert and Craig 1981, the variant proposed by
Khatib in 1987, and the optimal redundancy resolutionproposed by Nakamura in 1987.
The following movies shows a matlab implementation of the hybrid position/force control. A three-degrees-of-freedom planar robot moves its end-effector along an artificial wall (y-direction) while controlling the applied force (x-direction).
The
following movie shows a comparison between optimal (yellow) and local
(green) redundancy resolution. In particular, the algorithm minimizes
the kinetic energy of the robot. The two-point boundary value problem
was solved using bvp4c in Matlab.
September - Dicember 2008: Columbia University, New York, USA
By
the time I went back to Columbia for my MS in Mechanical Engineering,
all the pieces of the Fanuc were back together and the new actuators
were installed. During this period I have completed the entire cabling
of the robot: six motors, hall sensors, incremental encoders, and six
limit switches. Furthermore, I wrote the entire framework for real-time
control using Matlab xPC. The framework includes a PD controller,
automatic homing, and a graphic Matlab interface for displaying the robot motion on a computer screen (movie below).
March-June 2008: Robotics II, University of Rome "La Sapienza", Rome, Italy
During the third trimester of my second level laura
I worked again on dynamics of industrial manipulators. Under the guide
of Dr Alessandro De Luca, I have implemented Matlab Code for
automaticly writing the dynamic system of any n-degrees-of-freedom in
close-form starting from its Denavit-Hartenberg table. Moreover, the
regressor matrix was simbolicly computed. The algorithm was tested on a
Kuka KR5 Sixx. Among the most general set of dynamic coefficients(174),
the algorithm looks for common factors and identified 87 dynamic
parameters.
October-Dicember 2007: Computer Graphics, University of Rome "La Sapienza", Rome, Italy
The following is an overview of my final project in the Computer Graphics class I took at "La Sapienza" during my second level Laura
in Systems Engineering. I wrote C/C++ code using OpenGL and GLUT for
direct and indirect kinematics of the Fanuc robot. The entire resolved
rate algorithm was ported to C/C++ and the robot was modeled using
OpenGL and GLUT.The following are two movies shows some of the features.
The first movies shows the robot moving in task and joints space. The
upper right subwindows simulates the view of an eye-in-hand camera. The
user can define the task space path using the mouse. The second movie
shows the robot being guided with a 6 dofs joystick and examining
Leonardo Da Vinci's famous Mona Lisa.
May-August 2007: A.R.M.A. Lab, Columbia University, New York, USA
When I was a third year student at the University of Rome "La Sapienza", Rome, Italy, I spent four months at the Advanced Robotics and Mechanism Applications Laboratory
working on kinematics, dynamics, and parameter identification of
industrial serial robots. In particular I have focused on the Fanuc
ArcMate. The
robot was disassembled to calculate the gear ratios and find
information about the actuators. I have written Matlab code fordirect
and indirect kinematics, resolved rate algorithm based on the pseudo-inverse of the kinematic Jacobian
with a damping ratio depending on robot's singularity. I have computed
the dynamic model of robot manipulator in closed form using Maple and
simulated it using Matlab. Simulations included "free falling" of the
robot structure and a study on the capabilities of different control
architectures (conventional computed torque and its robust version).
(A)
(B)
(C)
(D)
(E)
Figure
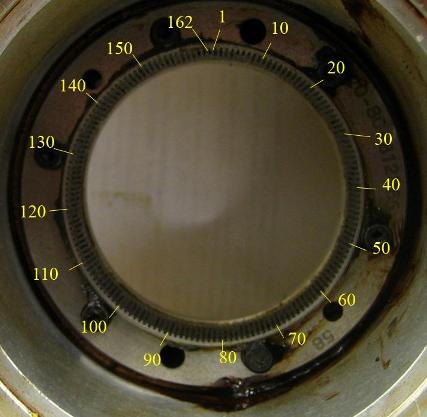
(A) shows the Fanuc robot. Figure (B) shows one side of the harmonc
drive that actuactes one of the wrist joints. The teeth were manually
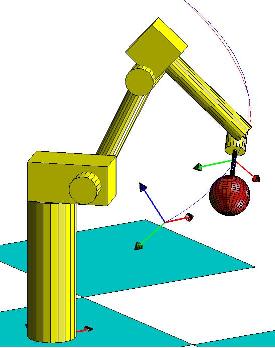
counted in order to find the gear ratio. Figure (C) shows a graphic
plot of a dynamic simulation. In particular the 5th order polynomial
trajectory in joint space was performed including the dynamic model of
the robot and an unknown load at the tip (the red ball). The actual and
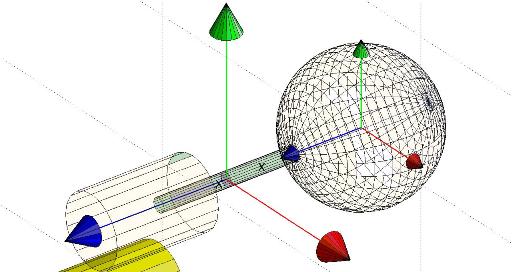
final orientation of the end-effector is also shown. Figure (D) shows
the modeling of the unknown load. The modified inerita matrix
related to the last joint was modified adding the sphere but the
computed torque algorithm was not updated. Different proportional gains
and the roboust impelementation of the PD + inverse dynamics was
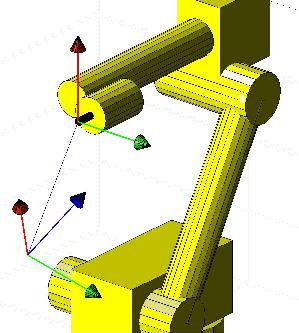
evaluated using this method. Figure (E) shows the implementation of the
resolved rate algorithm. The current and final pose is shown.