|
Developing analysis methods for Variable Geometry Parallel Robots for Stiffness Synthesis/Control
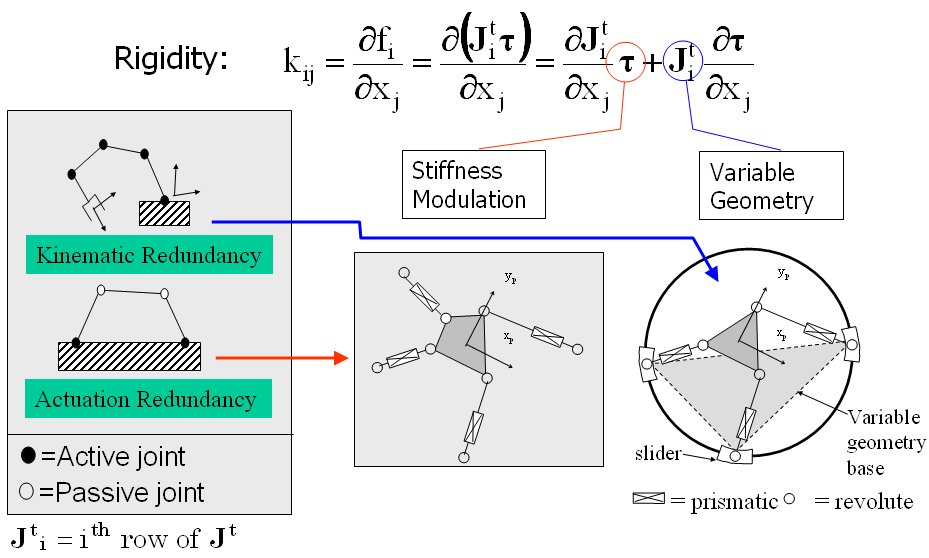
Figure 1: the focus of this research is on the use of actuation and kinematic redundancy for stiffness modulation and stiffness synthesis
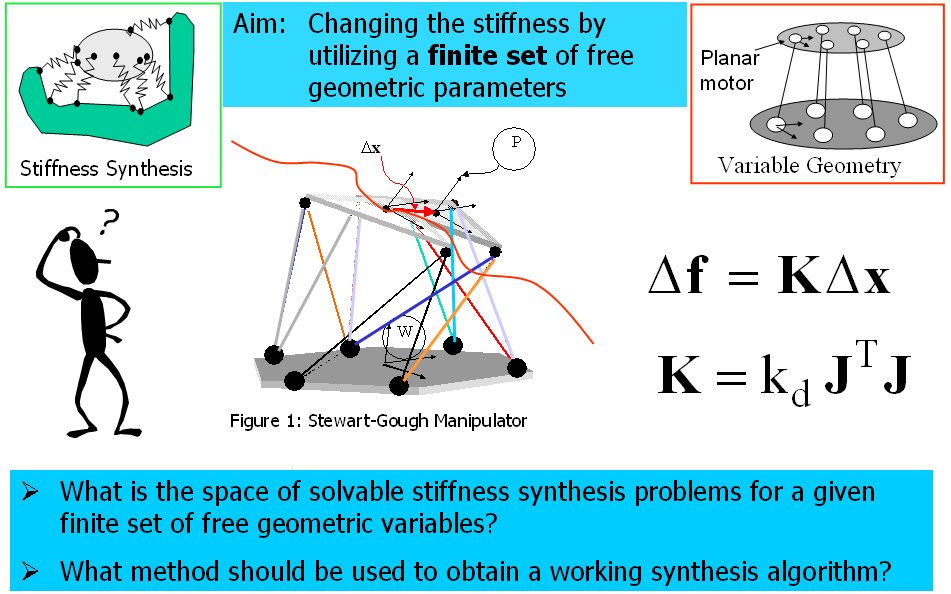
Figure 2: the problem of stiffness synthesis using a limited set of free geometric parameter that can be used to achieve desirable stiffness of parallel robots with kinematic redundancy
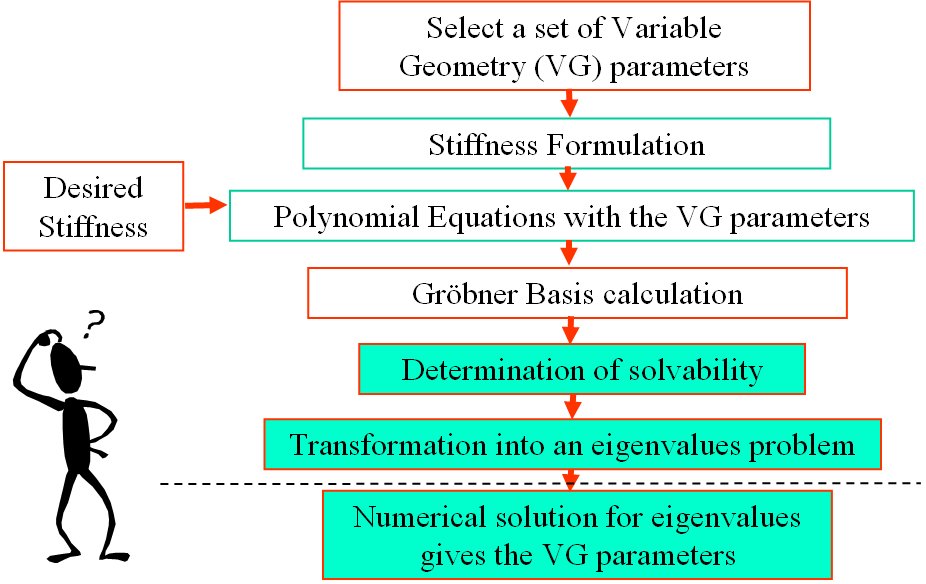
Figure 3: the solution method used for the problem of stiffness syhthesis of parallel robots with kinematic redundancy
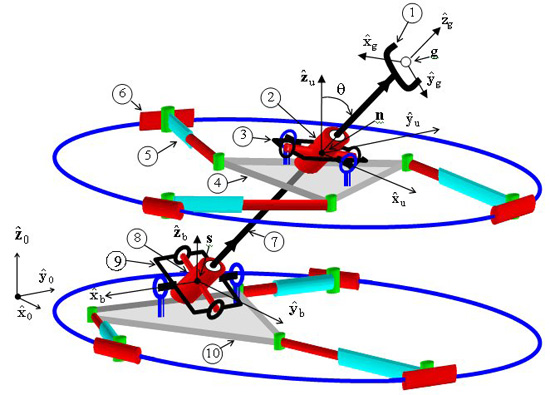
Figure 4: an example of a six DoF parallel robots with 12 actuators (parallel robot with kienmatic redundancy)
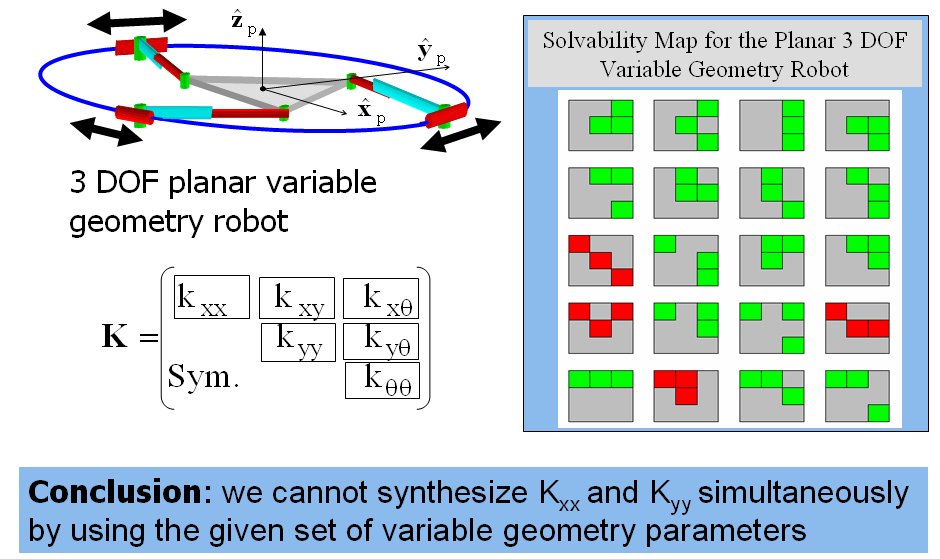
Figure 5: the solvability map for the stiffness synthesis problem of a planar parallel robot with six actuators. The green blocks designate stiffness components that can be synthesized independently using the given set of variable geometry parameters. In this example the variable geometry parameters are the locations of the three sliders on the circular base.
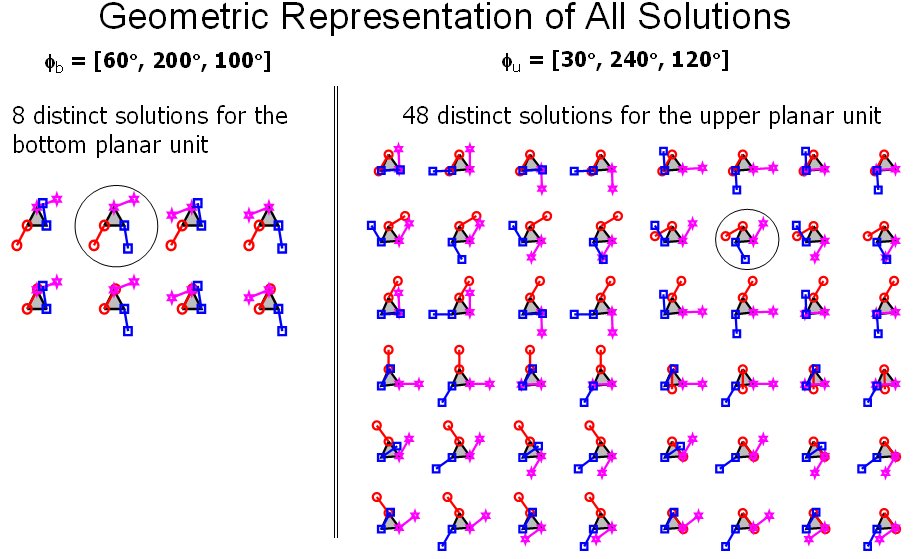
Figure 6: 384 possible real solutions for the problem of stiffness synthesis of the paralllel robot in figure 3. This problem was proven to have at most 48^2 solutions in the complex domain.
|
|