| [an error occurred while processing this directive] | |||
Current Projects:
This experiment was carried out in order to validate the force feedback abilities of surgical snake-like robots. The aim of force feedback is to determine the forces experienced in the secondary backbones of the snake-like robot. These forces are indicative of the sort of forces exerted by the snake-like robot on an outside surface. In the surgical field it is crucial that the robots used in surgery are precisely monitored so that they do not apply too much force to the body. 

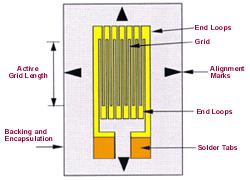
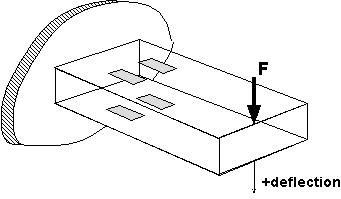
The Snake Like Robot in reality and modelled with Pro-E The focus of the work revolves around strain gauge technology. The experimentally calibrated strain gauges were used successfully for measuring the actuation forces. The calibration process was carried out using known weights to test the readings of the strain gauges. Essentially, four strain gauges detect the strain on the surfaces of a cantilever beam that is manipulated by a backbone of the robot. This data was then converted into the force applied, giving us a better look at the functionality and safety of the robot.
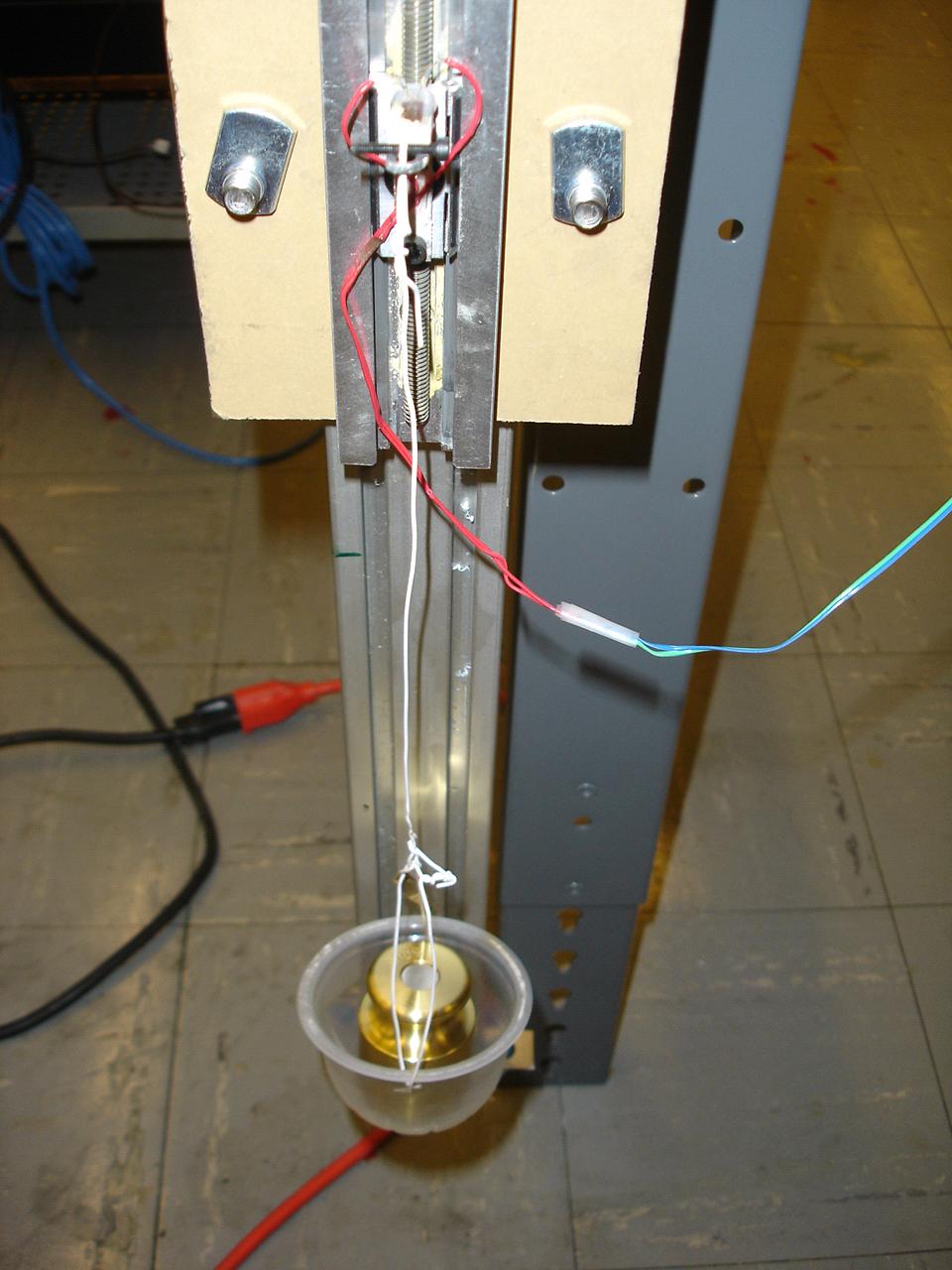
These strain gauges were calibrated by recording the output voltage
when a known force was applied. Wheatstone bridges were included to
single out the strain caused by the force of the weight from other
external sources of strain. The voltage from the Wheatstone
bridge was amplified x100 and sampled at 1Khz using a 13-bit A/D
channel. Readings were averaged over 1sec period of time for
filtering of measurement noise.
Once everything was calibrated and the mechatronics system was
connected the snake-like robot was actuated by two motors. The
motors forced the robot to bend to certain angles and the force on the
backbone was recorded for several points. The following chart compares
theoretical results of actuation force experienced at various actuation
angels to experimental results obtained for actuation of two secondary
backbones. 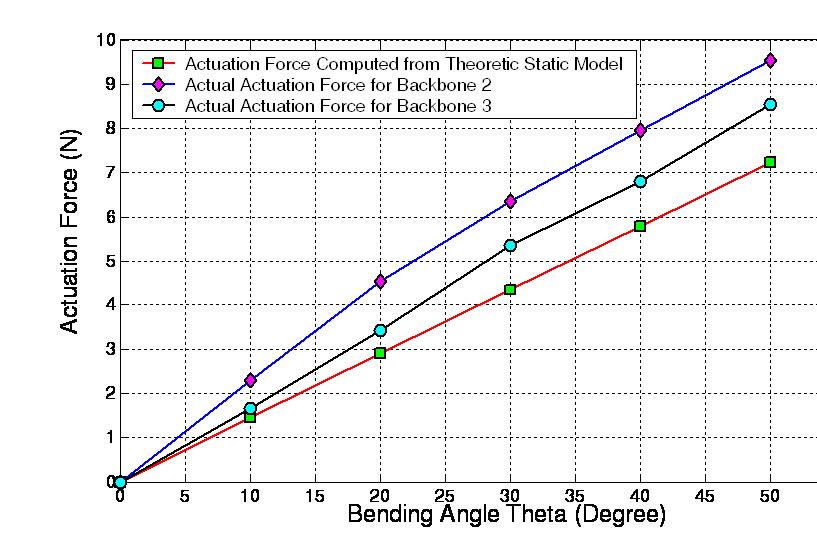
Results |
|||
| [an error occurred while processing this directive] | |||