| [an error occurred while processing this directive] | |
Image Guided in-vivo Tooling Platform for Minimal Acess Surgery Active Personnel:
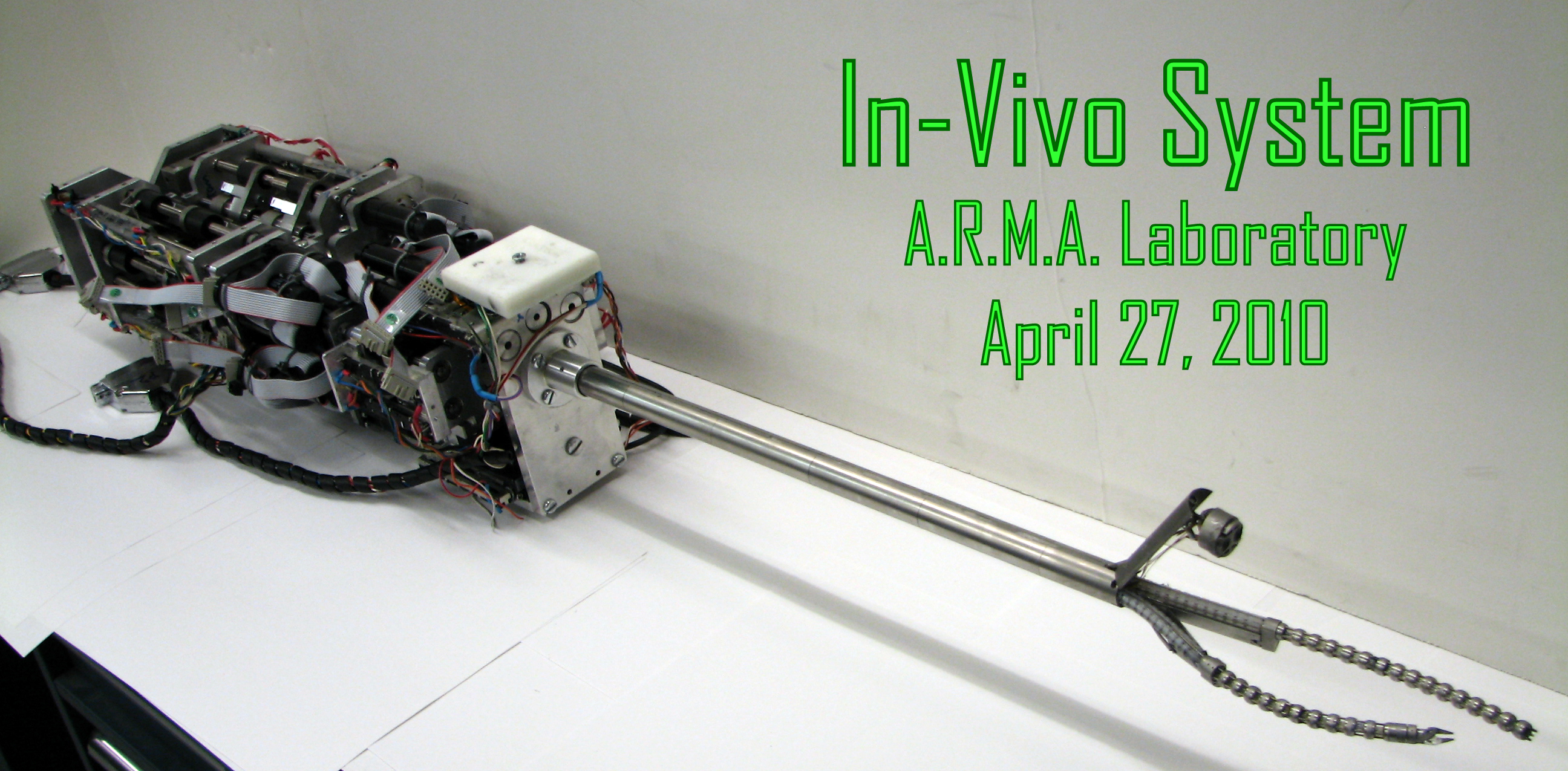
This 3-year NIH-funded project is an ongoing collaboration between ARMA, the Department of Surgery, and and Computer Science at Columbia University. Our project goals are to design insertable in-vivo robotic platform for single port surgery (less invasive surgery). This robotic platform is capable of bi-manual dexterous manipulation while providing stereo vision guidance. The system is also being designed for supporting several modalities of energy delivery, and sensory data collection. Figure 1 shows the current prototype of our system. The design allows this system to enter the abdominal cavity through a 15 mm trocar. When deployed, the system provides two highly dexterous arms for surgical intervention. A stereo camera module is used to automatically track instruments and for control feedback to compensate for deflection inaccuracies of the flexible continuum robot arms.
Figure 1. The IREP robot with two dexterous continuum robot arms and a controllable vision module Please note that you might have to allow permission to enable Windows Media player plugin to run under Firefox or Internet Explorer. For Firefox you should install the Windows Media Player Plugin available from http://port25.technet.com/pages/windows-media-player-firefox-plugin-download.aspx
Movie 1: Early tests of the IREP
Movie 2: Early tests of the IREP
Movie 3: In-Vivo Tool tracking (Credits: Austin Reiter, Jamie Landamn, Peter Allen. Columbia Robotics Lab) Publications
Collaborators |
|
| [an error occurred while processing this directive] | |