Current Projects:
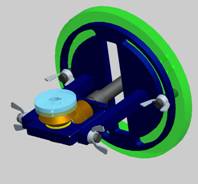
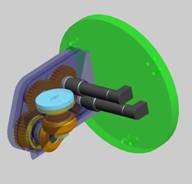
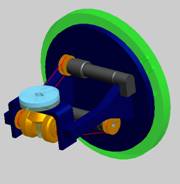
My undergraduate research project spring semester of 2007 supports Wei Wei’s work in the development of micro-surgical manipulators for dual-arm microsurgery by analyzing and designing several design alternatives for a dexterous compact microsurgical arm. Below you can find few design alternatives that I worked out during my project..
The first design is limited in that it only possesses one actuated degree of freedom (with two manual joints positioned with wingnuts), and for this reason it has been discarded as a viable option. The other two designs include the second degree of rotation, which extends the reachable area of the end effector considerably. For the first round prototype, the wire-driven design has been selected. This design requires fewer components and saves a considerable amount of weight over the bulkier anti-backlash gear-driven design. The differential drive train allows both motors to contribute torque to both degrees of rotation, allowing the use of smaller motors. Click here to see a movie showing one of the design alternatives.
|
||||||||||||