|
Analysis and Synthesis of Parallel Robots for Medical Applications
Project Description (1997 - 1999)
The RSPR3 Mini-Parallel Robot
Figure 1: The RSPR3 mini-parallel robot
Figure 2: The robot is performing random motions within its workspace
Figure 3: The robot is performing a homing process in which it rotates 90 degree
Figure 4: The robot closes the linear actuators until all limit switches are pressed
Further development
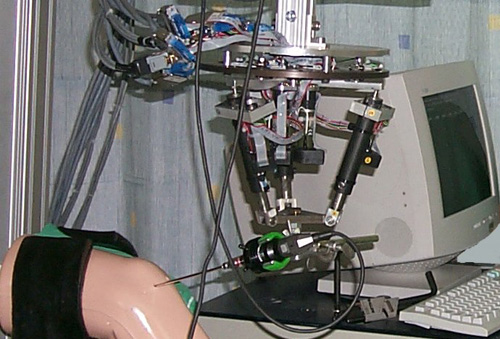
Figure 5: The RSPR3 manipulating an arthroscopic camera
Figure 6: The RSPR3 manipulating an arthroscopic camera during preliminary clinical setup evaluation 1999 Singularity analysis of composite serial in parallel robots using line geometry My M.Sc. also focused on the optimal dimensional synthesis of parallel robots. Part of my work focused on using line geometry for analyzing singularities of parallel robots that have multiple solutions for their inverse kinematics problem. These robots are called Compopsite Serial In-Parallel robots (CISP) and they exhibit singularities in which the robot looses degrees of freedom (serial singularities) or looses rigidity (parallel singularities). In my IEEE TRO paper an exhaustive analsyis of parallel singularities for a family oif 15 parallel robots is derived using synthetic proofs based on projective line geometry and degeneracy realtions of line varieties. Figure 6 summarizes all the parallel singularities of these parallel robots.
Figure 6: exhaustive singularity analsys for a family of 15 Composite Serial In-Parallel robots using Grassmann line geometry (see my IEEE TRO paper for details) Acknowledgments
References
|
|