| [an error occurred while processing this directive] | |
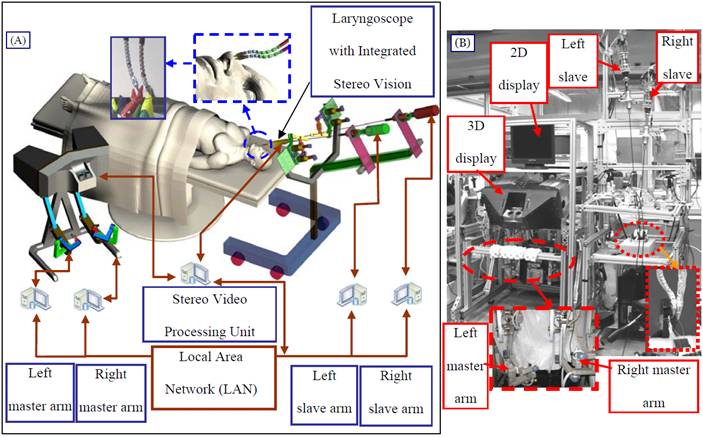
A system for Minimally Invasive Surgery of the Throat and Upper Airways Active ARMA Students: Active ERC-CISST Students: Minimally invasive surgery of the throat and upper airways is limited to procedures not involving suituring or complex tissue manipulation. As a result of instrument dexterity deficiencies, accurate tissue reconstruction susequent to excision of tumors is not possible. Our goal is to overcome this limitation in order to reduce invasiveness and to ensure preservation of normal vocal fold function subject to surgery. Figure 1 shows the layout of the system developed by the ERC-CISST and ARMA. This system uses a new generation of tele-robotic slaves capable of manipulating several dexterous instruments through a single access port - i.e. the patient's mouth.
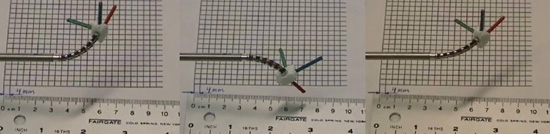
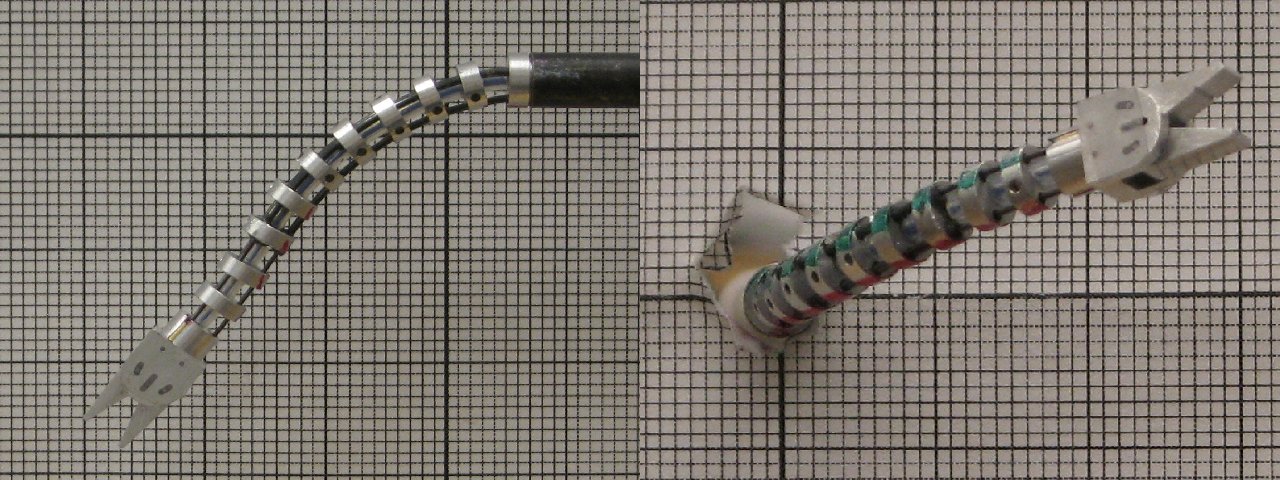
Figure 1: A system for Minimally Invasive Surgery of the thorat and the upper airways The focus of ARMA's research is on investigating novel distal dexterity units designed to manipulate surgical tools inside the patient's throat. These distal dexterity units are hybrid robots with each one composed from a snake-like unit and a parallel manipulation unit. Both the snake-like unit and the parallel manipulation unit implement NiTi super-elastic links to support downsize scalability of these device. A good description of the ongoing advances in this project can be found in our publications listed below. The following figure shows our current snake-like unit demonstrating basic 3D positioning capabilities. The diameter of this unit is 4.2 mm. We implement actuation redundancy to optimize the load distribution on the backbones of the snake-like unit.
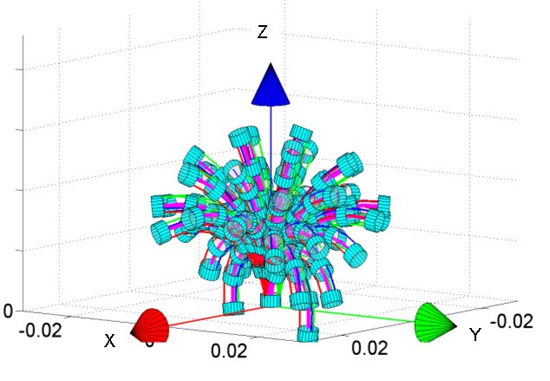
Figure 2: the Distal Dexterity Unit (DDU): a single segment (top), a two-segment DDU (bottom) Here are some small size movies demonstrating both early design simulations modelling and experimental prototypes (Please click the pictures below to see the movies). The movie below shows a single segment DDU scanning its workspace (also shown in figure 3). Please note that you might have to allow permission to enable Windows Media player plugin to run under Firefox or Internet Explorer. For Firefox you should install the Windows Media Player Plugin available from http://port25.technet.com/pages/windows-media-player-firefox-plugin-download.aspx
The movie below demostrates the capability of segments of the DDU to act as parallel robots capable of transmitting rotation along the central backbone by careful synchronized actuation of all secondary backbones. Please note that you might have to allow permission to enable Windows Media player plugin to run under Firefox or Internet Explorer. For Firefox you should install the Windows Media Player Plugin available from http://port25.technet.com/pages/windows-media-player-firefox-plugin-download.aspx
We have extended this rotation-about-backbone operation mode to allow suturing in confined spaces. Successful implememntation of this operation mode in a multi-segment DDU is predicated on very exact synchronous actuation of all secondary backbones while compensating for any modeling errors, friction, backlash, and extensibility of actuiation lines. The following movie shows the 2-segment DDU of figure 1 and figure 2 performing rotation about its central backbone. The movie shows the performance of this task with and without proper actuation compensation. Please note that you might have to allow permission to enable Windows Media player plugin to run under Firefox or Internet Explorer. For Firefox you should install the Windows Media Player Plugin available from http://port25.technet.com/pages/windows-media-player-firefox-plugin-download.aspx
Using this mode of operation, we were able to demonstrate dual-arm knot tying in confined spaces. Figure 4 below shows snapshots of this process:
Links to previous web page items: First Integration Experiments Using a snake-like robot on a 5 Dof LARS robot
Second Integration Experiments Using a new version of our modular 5 DoF snake-like device for MIS of the throat and upper Airways.
Click on Image for more details Collaborators Russell H. Taylor, Peter Kazanzides, Ankur Kapoor, Allison Okamura: ERC-CISST, Johns Hopkins University. Paul Flint, Johns Hopkins School of Medicine, department of Otolaryngology - Head & Neck Surgery. Publications
|
|
| [an error occurred while processing this directive] | |